Ученые из Нанкинского университета аэронавтики и астронавтики разработали нового четвероногого робота, модель которого была вдохновлена ящерицами. Такой дизайн позволит умным машинам передвигаться по Красной планете практически без ограничений.
Исследование Марса и его поверхности – увлекательный квест, поскольку он может выявить признаки прошлой или настоящей внеземной жизни, а также помочь найти ресурсы, необходимые для колонизации планеты.
Исследователи отмечают, что для привычных колесных марсоходов не доступны обширные территории по причине сложной структуры марсианского рельефа.
Решить эту проблему поможет биомиметический (имитирующий свойства биоматериалов) ползучий робот с гибкой структурой тела, который может копировать движения и стиль передвижения пустынной ящерицы.
Чтобы воспроизвести характерные движения пресмыкающихся, каждая нога оснащена двумя шарнирами и шестеренкой, которая вызывает раскачивающееся движение. Тазобедренные суставы, соединяющие позвоночник с ногами робота, состоят из двух сервоприводов и механизма, который позволяет роботу подниматься, не теряя равновесия. «Ноги» робота имеют четыре гибких «пальца», состоящих из двух шарниров и «когтя».
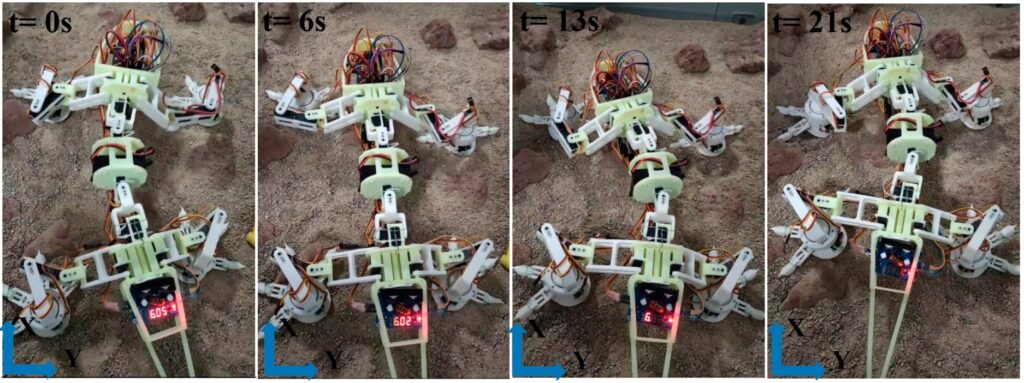
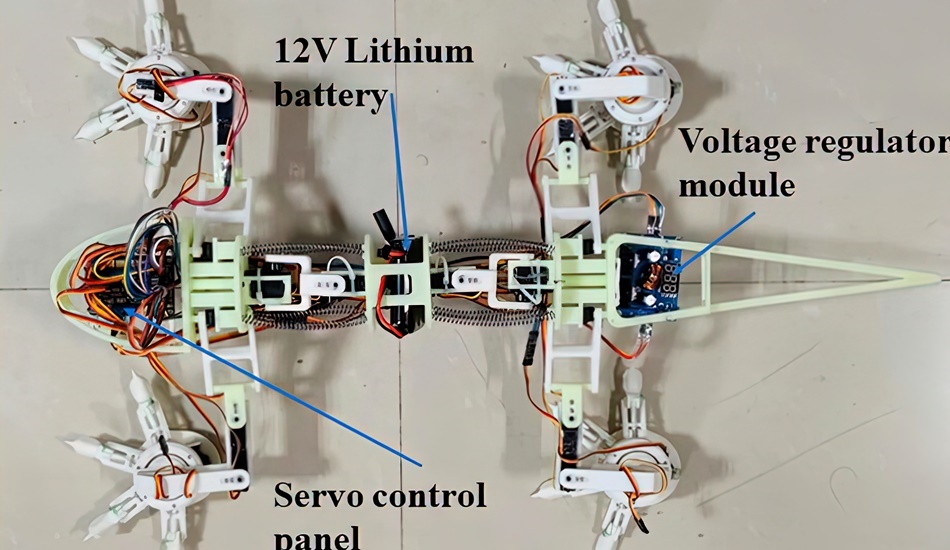
Ученые уже создали прототип своего робота, используя полимерные материалы, напечатанные на 3D-принтере, сервопанель управления, литиевую батарею и другие электронные компоненты.
Они работают над моделями машинного обучения, которые позволят аппарату адаптировать свои движения к различным ландшафтам. Также, планируется внедрить систему, обеспечивающую непрерывное энергопитание робота.