

Ученые из Лаборатории робомеханики Университета Карнеги-Меллон создали четырехногого робота LORIS, который способен карабкаться по любым поверхностям благодаря специальным микрозахватам с крючками. Он цепляется за неровные вертикальные поверхности с помощью уникального механизма, который очень эффективен и относительно прост.
Сегодня экспериментальные роботы используют системы захвата на основе присосок для лазания по гладким поверхностям. Однако такая технология не работает на шероховатых поверхностях, таких как скалы или стены.
Одна из альтернатив – использование так называемых микроспинных или микрошпиндельных захватов. Они состоят из множества крошечных острых крючков, которые зацепляются за небольшие углубления в поверхности.
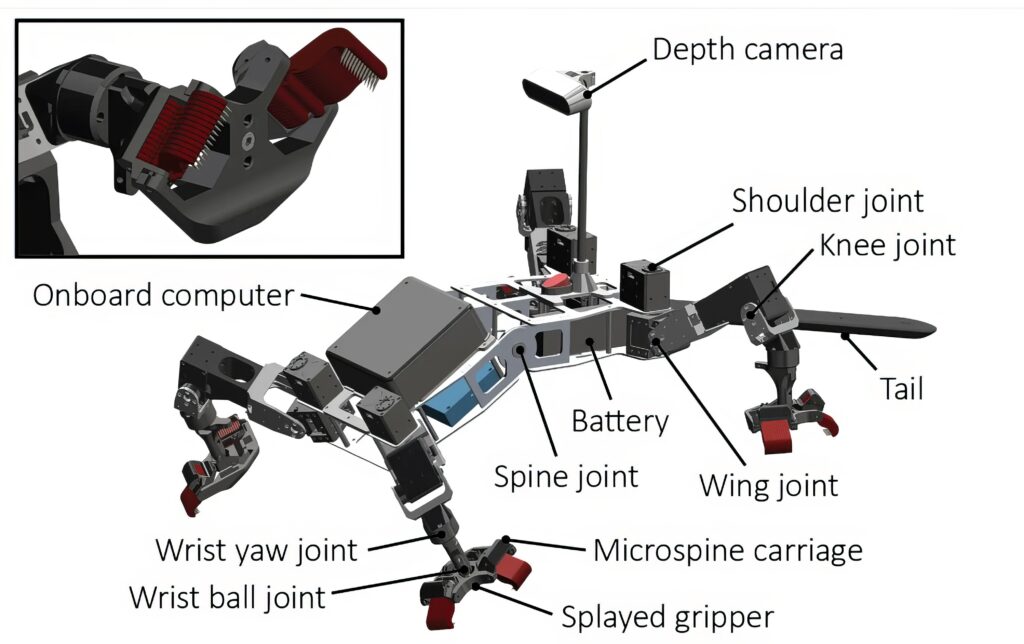
На конце каждой из четырех ног бота находится разветвленный микроспинный захват, состоящий из двух групп шипов, расположенных под прямым углом друг к другу. Захват соединен с ногой специальным суставом.
Активные захваты используют электрические приводы, которые целенаправленно погружают крючки в поверхность. На роботе установлены камера с датчиком глубины и микропроцессор.
По словам исследователей, LORIS сочетает в себе малый вес, скорость, энергоэффективность и простоту пассивных микроспинных захватов. Кроме того, робот отличается простотой и дешевизной производства.
LORIS может быть использован для решения большого спектра задач, таких как поисково-спасательные операции, мониторинг строительных работ и исследования труднодоступных территорий.


